एन्कोडर एप्लिकेसन/लजिस्टिक उद्योग
रसद Inductries को लागी एन्कोडर
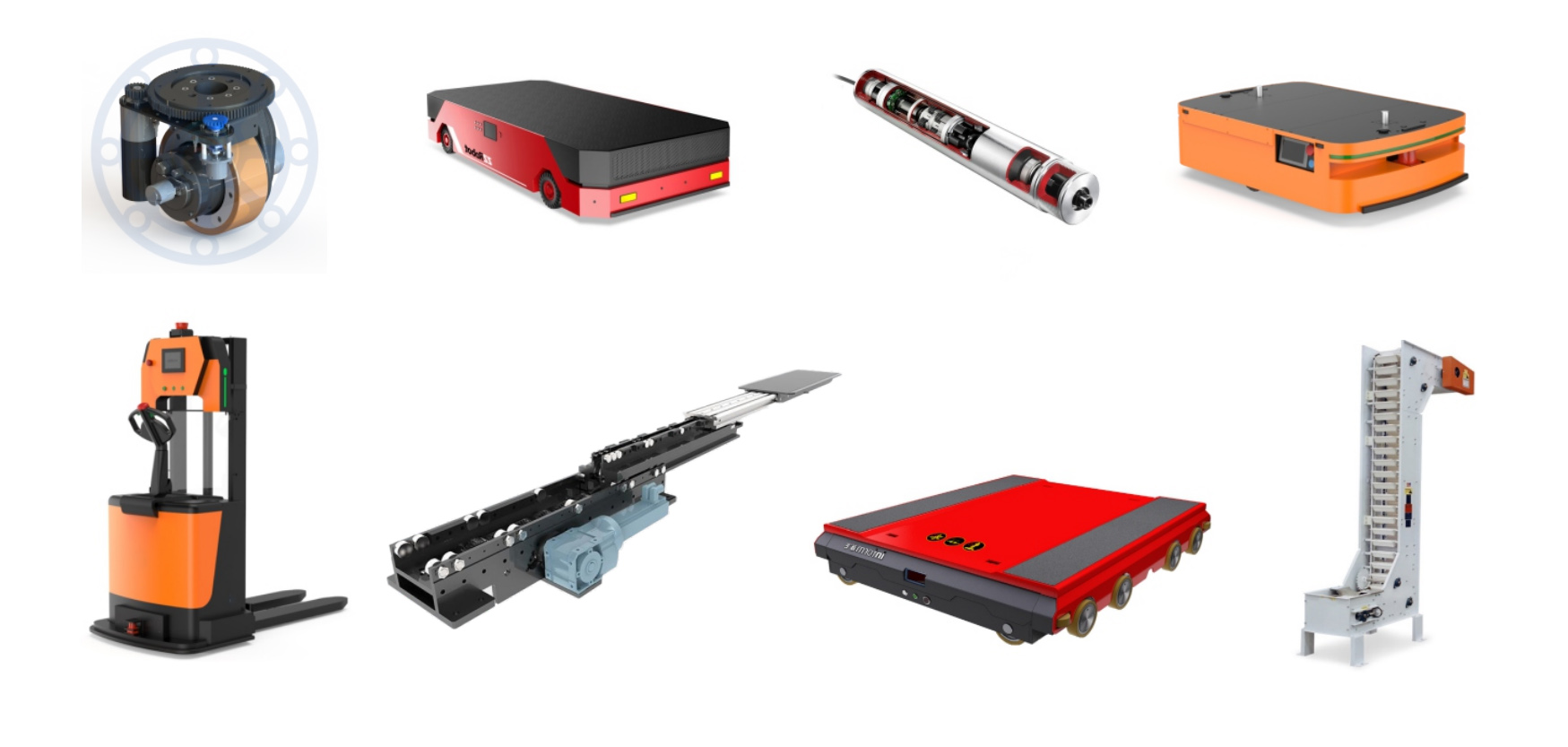
स्वचालन र मानवरहित ड्राइभिङ प्रविधिको विकासको साथ, विभिन्न स्वचालित रसद उपकरणहरू रसद उद्योगमा व्यापक रूपमा प्रयोग गरिएको छ;एडिक एन्कोडरहरू विभिन्न स्वचालित रसद उपकरणहरू हुन्, जस्तै: मानवरहित फोर्कलिफ्टहरू, होइस्टहरू, टेलिस्कोपिक फोर्कहरू, रोलर्स मोटरहरू, स्टेयरिङ ह्वीलहरू, शटल कारहरू, एजीभी ट्रलीहरू, भारी-ड्युटी एजीभीहरू र अन्य उपकरणहरूले गति निगरानी, कुना अनुगमन, दूरी निगरानी र अन्य समाधानहरू प्रदान गर्दछ। विभिन्न स्वचालन उपकरणहरूको सुरक्षित, द्रुत र सही सञ्चालन सुनिश्चित गर्न, यसरी प्रणाली कार्य निर्देशनहरू द्वारा जारी गरिएका विभिन्न आदेशहरू पूरा गर्दै।
रसद उद्योगहरूमा एन्कोडरहरू:
1. बहु-टर्न निरपेक्ष एन्कोडर;
2. ठोस शाफ्ट इन्क्रिमेन्टल एन्कोडर;
3. खोक्रो शाफ्ट इन्क्रिमेन्टल एन्कोडर मार्फत;
4. तार एन्कोडर कोर्नुहोस्;
AGV र स्टीयरिङ ह्वील उद्देश्यमा एन्कोडरको आवेदन
AGV गाडीको ड्राइभिङ गति र मोडिँदा स्टेयरिङ कोण नाप्नुहोस्;
स्टीयरिंग व्हील को स्टीयरिंग कोण मापन;फाइदाहरू: सानो आकार, उच्च परिशुद्धता, राम्रो स्थिरता, र लागत प्रभावी।एन्कोडर चयन: बहु-टर्न निरपेक्ष एन्कोडर;वैकल्पिक संचार प्रोटोकल: CANopen.Modbus, Profibus, Profinet,EtherCAT, DeviceNet, SSI
सिफारिस गरिएको मोडेल: GSA-38L6 श्रृंखला
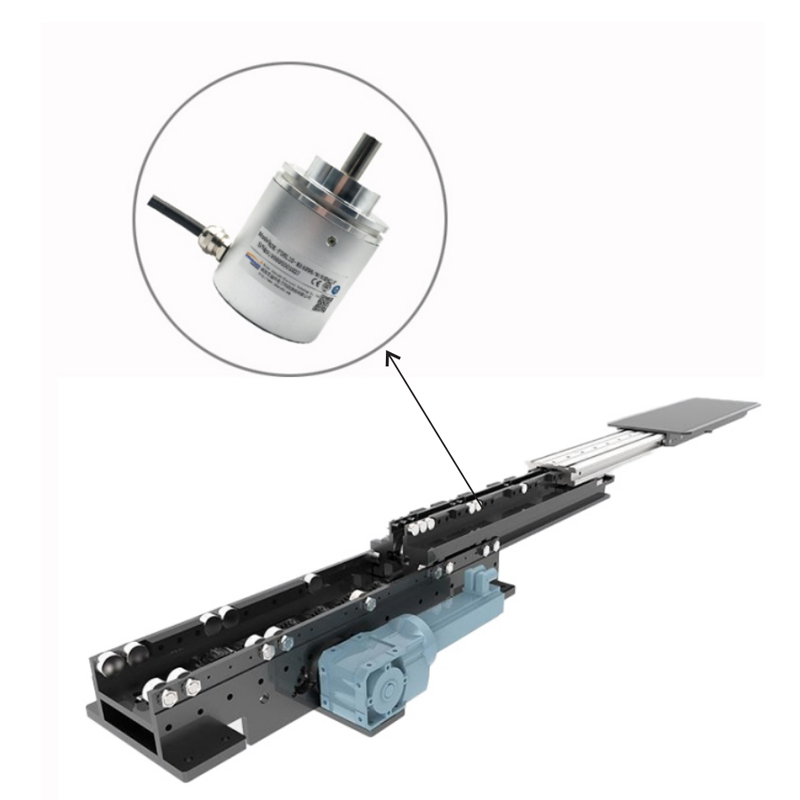
टेलिस्कोपिक फोर्कलिफ्ट उद्देश्यमा एन्कोडरको आवेदन
यात्रा गति, वास्तविक-समय स्थिति, र टेलिस्कोपिक फोर्कलिफ्टको स्टीयरिंग कोण मापन गर्नुहोस्;फाइदाहरू: विरोधी हस्तक्षेप र क्यालिब्रेटेबल;एन्कोडर चयन: बहु-टर्न निरपेक्ष एन्कोडर;
वैकल्पिक संचार प्रोटोकल: CANopen.Modbus, Profibus, Profinet, EtherCAT, DeviceNet, SSI, समानांतर
सिफारिस गरिएको मोडेल: GMA-F58B10-1213-B4PNLP
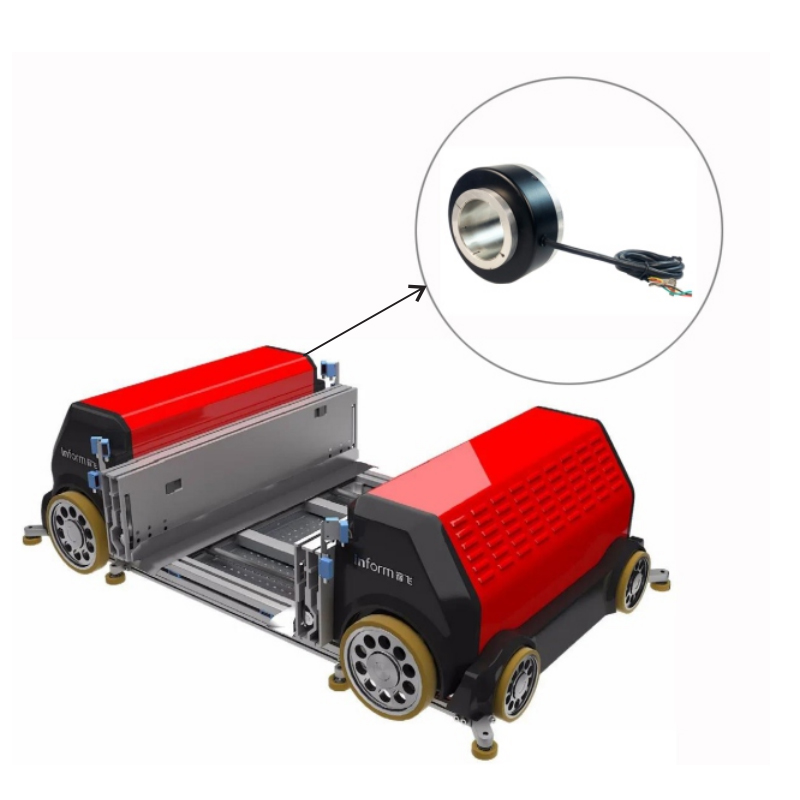
भारी शुल्क AGV वाहनमा एन्कोडरको आवेदन
उद्देश्य: ड्राइभिङ गति, वास्तविक-समय स्थिति, र भारी शुल्क AGV को स्टेयरिङ कोण नाप्नुहोस्;फाइदाहरू: कम्प्याक्ट संरचना, उच्च परिशुद्धता, विरोधी हस्तक्षेप, र उच्च प्रसारण दर;एन्कोडर चयन: बहु-टर्न निरपेक्ष एन्कोडर, पुल-तार एन्कोडर;
वैकल्पिक संचार प्रोटोकल: CANopen.Modbus, Profibus, Profinet, EtherCAT, DeviceNet, SSI, समानांतर
सिफारिस गरिएको मोडेल:
GMA-F58L10 श्रृंखला, GI-D20 श्रृंखला, GMA-F58B10 श्रृंखला
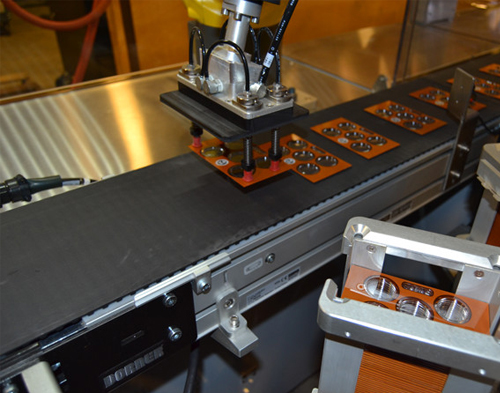
शटल कार मा एन्कोडर को आवेदन
उद्देश्य: घुमाउँदा शटल कारको गति र स्टेयरिङ कोण नाप्ने;एन्कोडर चयन: ठूलो खोक्रो इन्क्रिमेन्टल एन्कोडर;
वैकल्पिक आउटपुट मोड:NPN खुला कलेक्टर, PNP खुला कलेक्टर, पुश-पुल आउटपुट, भिन्नता आउटपुट, भोल्टेज आउटपुट
एन्कोडर चयन सिफारिस
सिफारिस गरिएको मोडेल: GHI-80 श्रृंखला
होइस्ट मेसिनमा एन्कोडरको आवेदन
उद्देश्य: उठाउने स्थिति मापन;फाइदाहरू: दृढता, उच्च विश्वसनीयता, लामो जीवन, बलियो वातावरण प्रतिरोध;इन्कोडर चयन: खोक्रो वृद्धिशील एन्कोडर;
वैकल्पिक आउटपुट मोड: NPN खुला कलेक्टर, PNP खुला कलेक्टर, पुश-पुल आउटपुट, भिन्नता आउटपुट, भोल्टेज आउटपुट
सिफारिस गरिएको मोडेल: GHI-60 श्रृंखला
मानवरहित फोर्कलिफ्टमा एन्कोडरको आवेदन
उद्देश्य: मानवरहित फोर्कलिफ्टहरूको लिफ्टिंग उचाइ मापन गर्नुहोस्;लाभ: परिशुद्धता, स्थिरता, कम्प्याक्ट आकार;
एन्कोडर चयन:
तार एन्कोडर तान्नुहोस्;वैकल्पिक मापन लम्बाइ: 500mm-10000mm;वैकल्पिक आउटपुट मोड: NPN खुला कलेक्टर, PNP खुला कलेक्टर, पुश-पुल आउटपुट, भिन्नता आउटपुट, भोल्टेज आउटपुट
निरपेक्ष एन्कोडर: CANopen.Modbus, Profibus, Profinet, EtherCAT, DeviceNet, SSI, आदि। एनालग आउटपुट: 4-20mA, 0-10v
एन्कोडर चयन सिफारिस सिफारिस गरिएको मोडेल: ADK60 श्रृंखला